

Unified Complex Coefficient PID Controller Tuning for Complex Coefficient System
Avionics
Generally, controllers are tuned to meet the desired time and frequency domain specifications for integer/fractional order real coefficient systems whose frequency response is symmetric about the origin of the complex frequency plane. These controllers are tuned through analytical/numerical approaches. On the contrary, the frequency responses of the complex coefficient systems are unsymmetrical, and hence tuning of controllers should consider both positive and negative frequencies. In this article, tuning of complex coefficient proportional integral derivative controller is proposed for such systems to meet the desired frequency domain specifications in positive and negative frequencies. For illustration, the simulation results are presented for stable, unstable, and non-minimal phase systems with the proposed tuning method.
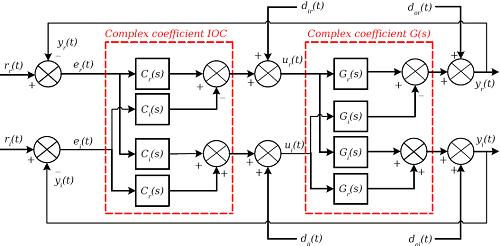
Fig.1 CCTF representation in closed loop
Ref: P.Sathishkumar, N.Selvaganesan, "Tuning of Complex Coefficient PI/PD/PID Controllers for a Universal Plant Structure", International Journal of Control, Vol.94, Issue 11, PP.3190-3212, 2021.
Ref: M.Rohith Bala, P.Sathishkumar, N.Selvaganesan, "Unified complex coefficient PID controller tuning for complex coefficient system", IETE Journal of Education, 2021 (Accepted)